毫米波雷达传感器的工作原理
最佳答案:
毫米波雷达传感器的工作原理
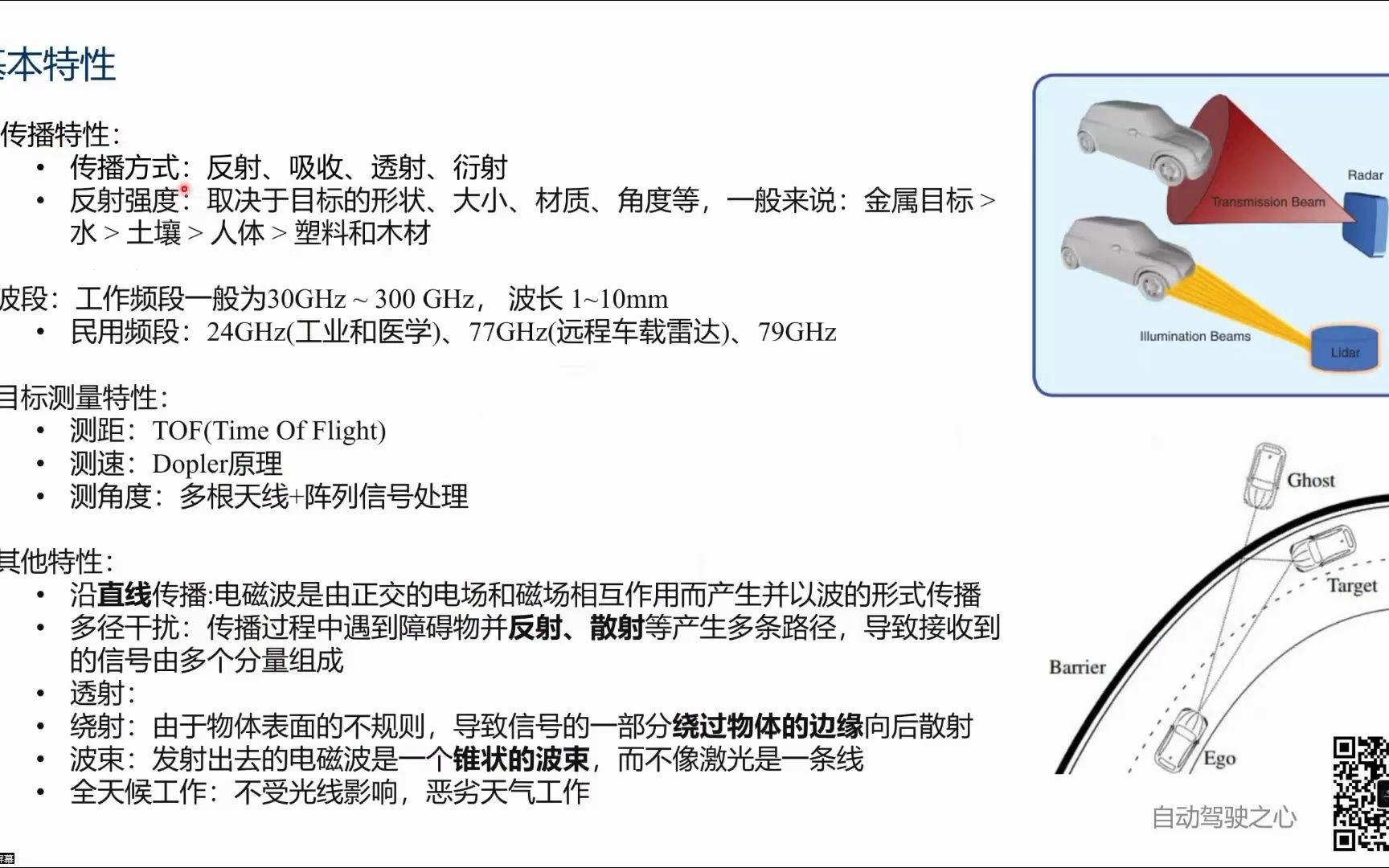
毫米波雷达传感器的工作原理主要是通过发射和接收毫米波来探测目标的距离、速度和方位角。具体来说,毫米波雷达传感器通过天线向外发射毫米波,当这些毫米波遇到障碍物或其他目标时,会被反射回来并被雷达接收。通过对这些反射信号的分析,可以获取目标的相关信息。
1. 距离测量:毫米波雷达传感器利用飞行时间(Time of Flight, ToF)原理来测量距离。通过测量发射波与接收波之间的时间差,结合毫米波的传播速度,可以计算出目标与雷达之间的距离[[4]()]。
2. 速度测量:速度测量则是利用多普勒效应。多普勒效应指出,当波源与观察者之间存在相对运动时,观察者接收到的波的频率会发生变化。通过分析接收信号的频率变化,可以计算出目标相对于雷达的运动速度[[3]()]。
3. 方位角测量:方位角测量通常通过相位差法实现。毫米波雷达传感器发射的毫米波在遇到目标后反射回来,通过分析接收信号的相位差,可以计算出目标的方位角[[7]()]。
毫米波雷达传感器在实际应用中可能会采用不同的技术,例如脉冲雷达、连续波雷达(包括CW恒频连续波和FMCW调频连续波)等,但基本原理都是围绕上述三点展开的。不同的技术选择会影响雷达的性能,如距离分辨率、最大观测距离等[[8]()]。